

ZEISS Quality Software
Esplora le nostre soluzioni software: dall’analisi alla gestione dei datiElevata flessibilità e analisi di alta precisione
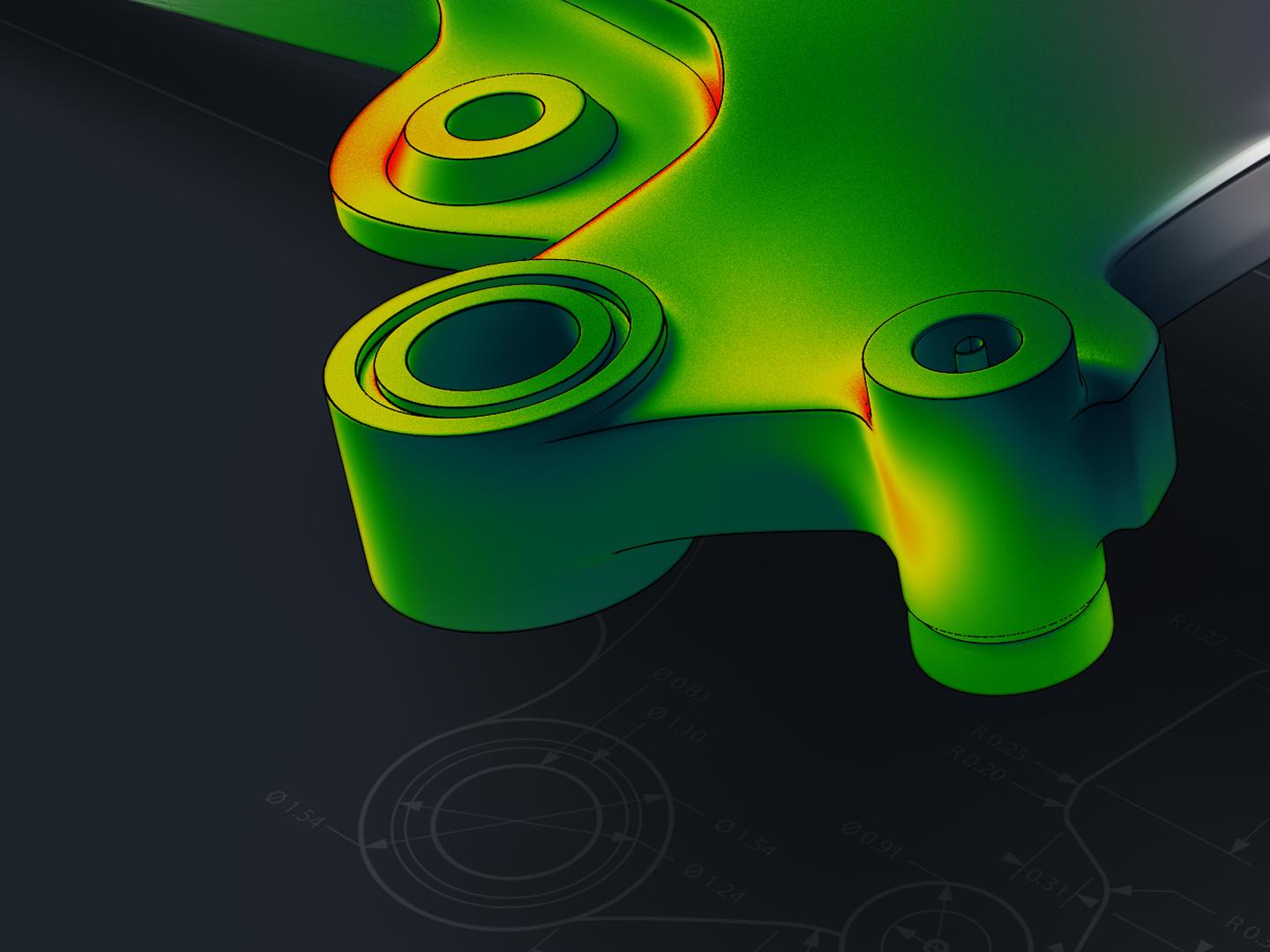
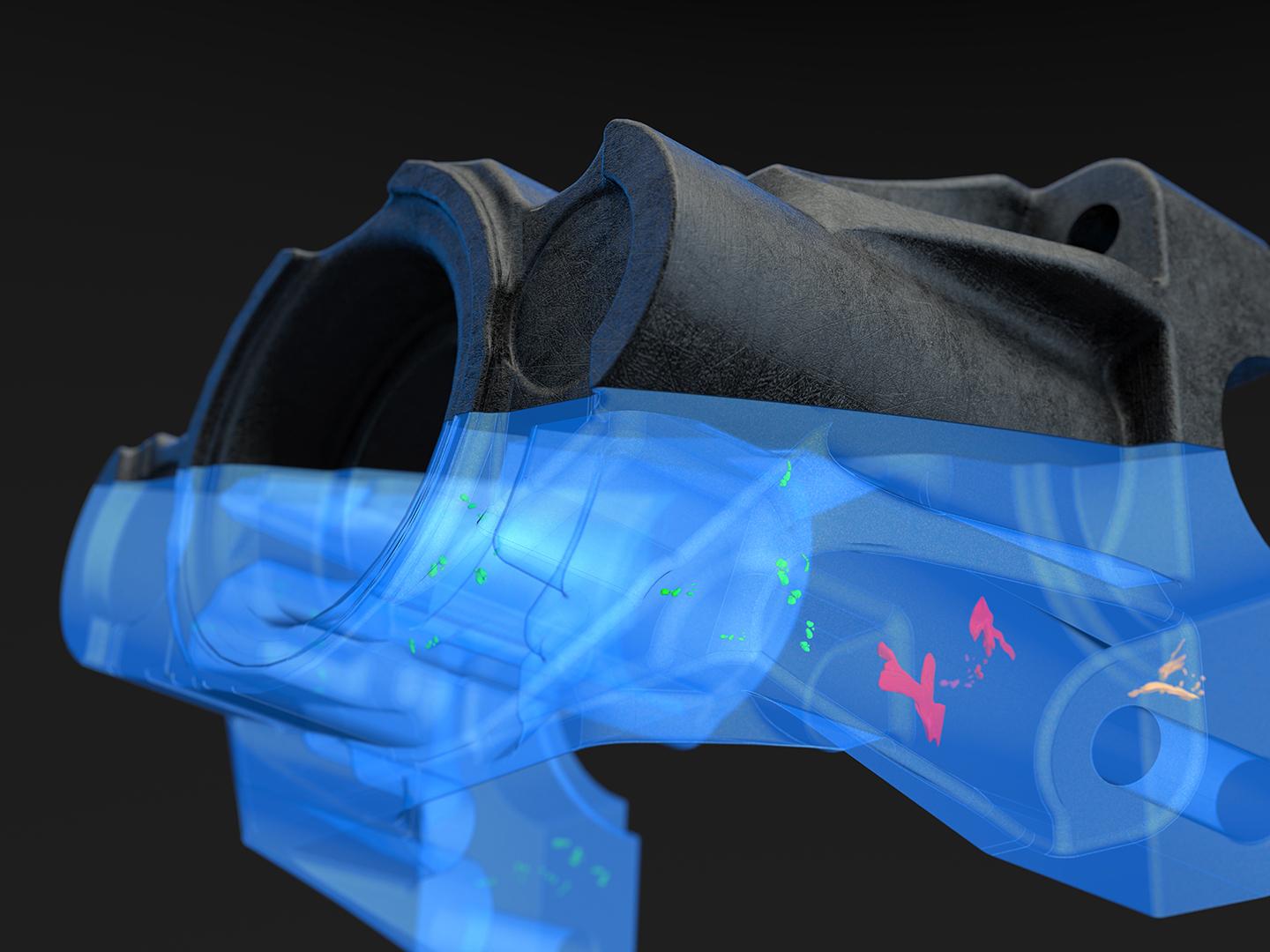
Alta qualità nel processo produttivo? Con gli strumenti giusti è semplice. ZEISS Quality Software ti consente di analizzare i componenti in modo preciso e intuitivo. In base alle tue esigenze, puoi eseguire valutazioni, analisi e report integrati tra diverse tecnologie e sistemi, per una gestione della qualità realmente olistica.
Software di metrologia e analisi


















Software di gestione dei dati e della qualità








Servizi
Scopri i servizi integrati di ZEISS Quality Software, pensati per migliorare costantemente i tuoi risultati. Con un programma completo di formazione, supporto software dedicato e forum di esperti, puoi massimizzare la produttività sfruttando al meglio le funzionalità più recenti. I nostri corsi di formazione, già scelti da centinaia di tecnici specializzati, sono progettati per sviluppare competenze solide nel campo della metrologia. L’offerta si articola in tre livelli: base, per chi muove i primi passi; avanzato, per approfondire conoscenze e competenze; opzionale, per personalizzare il percorso formativo Classi a numero ridotto e ambienti multimediali garantiscono un apprendimento efficace e coinvolgente. Al termine di ogni corso viene rilasciato un attestato di partecipazione personalizzato. A completamento dei servizi, offriamo la creazione di part program mirati a ottimizzare i processi di misura, assicurando risultati sempre accurati e ripetibili.







FAQ
-
Ulteriori informazioni su ZEISS Quality Suite sono disponibili qui.
Questo link porta al download diretto. -
Attualmente è possibile accedere alla soluzione completa ZEISS INSPECT e a ZEISS PiWeb, ZEISS CORRELATE, ZEISS REVERSE ENGINEERING e ZEISS CALIGO tramite la ZEISS Quality Suite.
-
Con un contratto di manutenzione software (SMA) di ZEISS, tu e la tua azienda potete beneficiare di servizi aggiuntivi per ottenere le massime prestazioni dei sistemi ZEISS ed evitare i fermi macchina. Gli aggiornamenti regolari del software sono il prerequisito per processi a prova di futuro. La manutenzione del software ZEISS garantisce una qualità a lungo termine e porta molti altri vantaggi. Il software di misura più recente ti consente di essere sempre aggiornato per ottenere la massima produttività e di risparmiare tempo grazie a installazioni di aggiornamenti pianificabili e prevedibili.
-
È possibile utilizzare vari prodotti ZEISS Quality Software anche senza un sistema ZEISS. Il nostro software di analisi è indipendente dal dispositivo. Con ZEISS INSPECT, ad esempio, è possibile valutare e analizzare i dati ottici 3D o di volume, indipendentemente dalla fonte, e creare rapporti completi. ZEISS PiWeb funziona indipendentemente dalla tecnologia di misura e integra persino i dati ottenuti manualmente
-
Sì, certo. È possibile ottenere gratuitamente ZEISS Quality Suite qui. È inoltre possibile testare per un certo periodo molte delle nostre varianti di software, ad esempio ZEISS INSPECT. È possibile ricevere e attivare la licenza di prova all’interno di ZEISS Quality Suite